
Hi! I’m a first-year PhD student at OpenRobotLab@Shanghai AI Lab(through joint-training program with CS@ZJU), advised by Jiangmiao Pang and Dahua Lin, co-advised by Xiaowei Zhou. Prior to this, I got my bachelor’s degree from College of Control Science and Engineering and Chu Kochen Honors College(Advanced Honor Class of Engineering Education) at Zhejiang University in 2024.
My research interests include Embodied AI, Robot Learning and Computer Vision, currently I’m working on humanoid robot motion generation. Feel free to reach out to me :)
Recent News
- 2024.09: MGF is accepted by Neurips 2024 🎉 Many thanks to Jinkun and Jiangmiao!
- 2024.07: We released GRUtopia(aka. 桃源 in Chinese), the first simulated interactive 3D society designed for various robots.
Publications
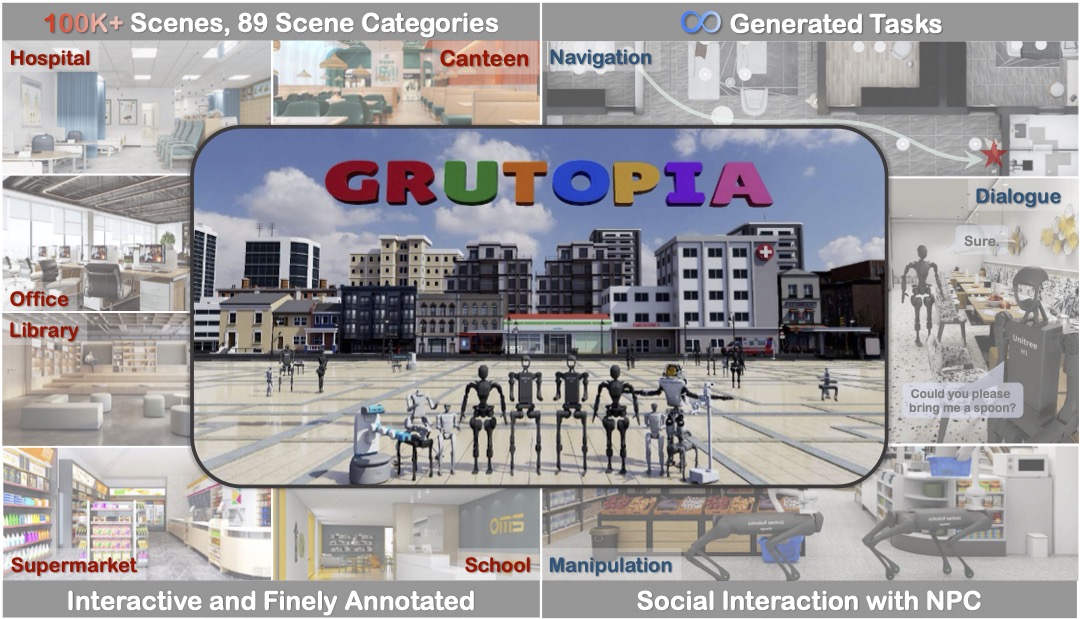
GRUtopia: Dream General Robots in a City at Scale
Hanqing Wang$\ast$, Jiahe Chen$\ast$, Wensi Huang$\ast$, Qingwei Ben$\ast$, Tai Wang$\ast$, Boyu Mi$\ast$, Tao Huang, Siheng Zhao, Yilun Chen, Sizhe Yang, Peizhou Cao, Wenye Yu, Zichao Ye, Jialun Li, Junfeng Long, Zirui Wang, Huiling Wang, Ying Zhao, Zhongying Tu, Yu Qiao, Dahua Lin, Jiangmiao Pang$\dagger$
Github |

- We proposed GRUtopia, the first simulated interactive 3D society designed for various robots. It features (a)GRScenes, a dataset with 100k interactive and finely annotated scenes. (b) GRResidents, a LLM driven NPC system. (c) GRBench, a benchmark posing moderately challenging tasks.
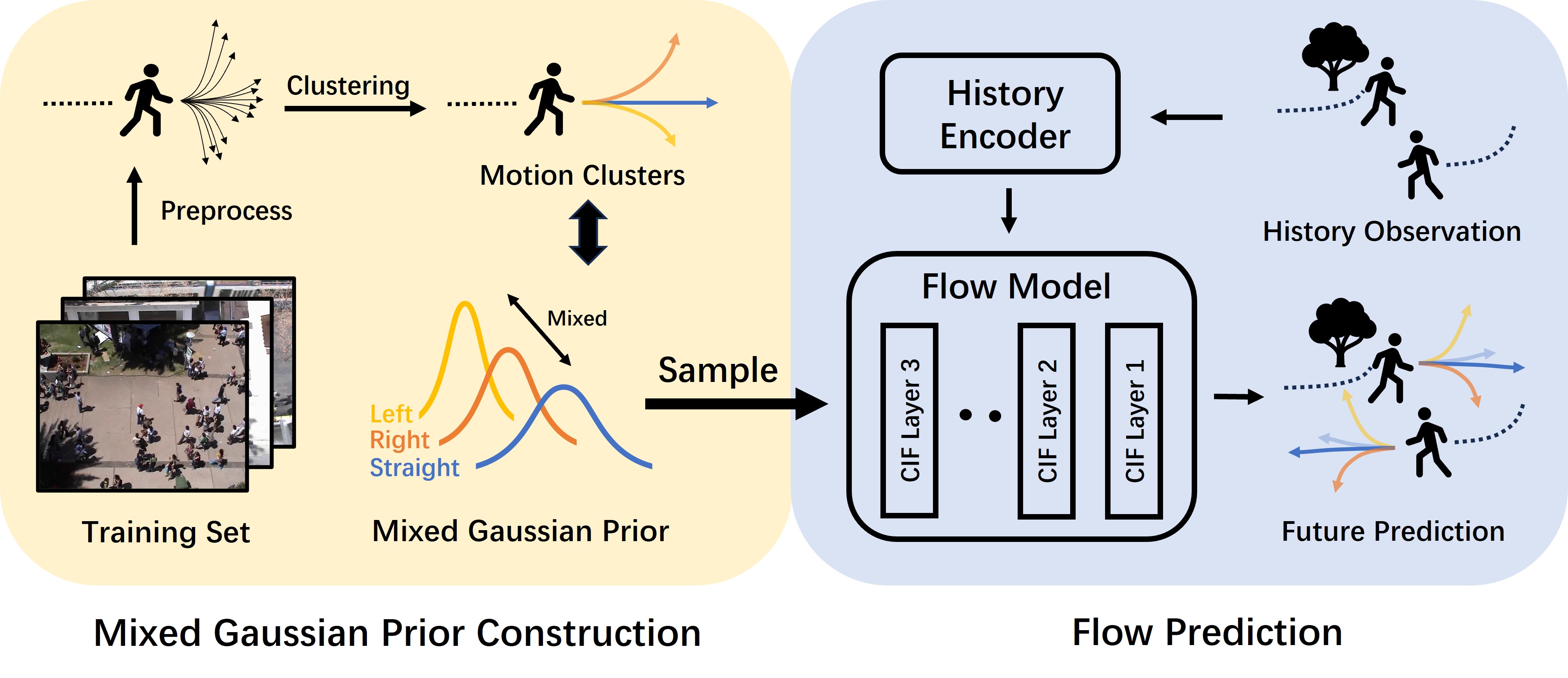
MGF: Mixed Gaussian Flow for Diverse Trajectory Prediction
Jiahe Chen$\ast$, Jinkun Cao$\ast$, Dahua Lin, Kris Kitani, Jiangmiao Pang$\dagger$
Github | 
- We proposed MGF for improving the diversity of trajectory prediction, which achieves SOTA performance in the evaluation of both accuracy and diversity.
Honors and Awards
- Zhejiang University Outstanding Graduate.
- Zhejiang Government Scholarship.
- Zhejiang University 1st Class Scholarships.
Internships
- 2023.02 - 2024.07, Shanghai AI Lab, advised by Jiangmiao Pang.
- 2022.09 - 2023.06, CSE@ZJU, advised by Qingyuan Ren.
- 2022.05 - 2022.11, CS@W&M, advised by Huajie Shao.
- 2021.04 - 2021.10, Supcon, advised by Wenjun Huang.